پاسخگویی سریع
کارشناسان گرین کو، آماده ارائه خدمات در کمترین زمان به شما عزیزان هستند.
جک پارکینگ اکسیژن جک پارکینگ اکسیژن محصول جدیدی از ایرانمهر جک اکسیژن با توان کاری 320وات و دمای کاری +50،-10 تحت لیسانس ایتالیا لوله استیل 302 تردد نامحدود بدون صدا و ضربه گارانتی 30ماهه

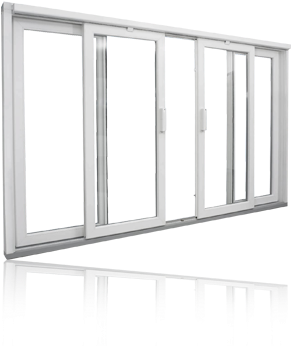
سیستم های درب اتوماتیک برای انواع درها اعم از بزرگ یا کوچک، سنگین یا سبک در دسترس است. علاوه بر این، تقریباً در هرگونه طرح قابل تصور مانند: تمام شیشه، قاب دار، چوبی، آلومینیوم یا فولاد در دسترس هستند.
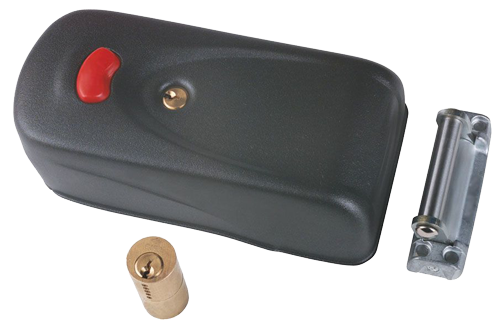
این قفل مورد استفاده برای درب های حیاط منازل مسکونی است که دارای یک قفل باز کن است. ساز و کار آن به این شکل است، زمانی که شما دکمه را برای باز شدن در فشار میدهید، یک ولتاژ در بوبین ها یک میدان مغناطیسی ایجاد میکند. این حالت مغناطیسی زبانه در را می¬کشد و در نهایت منجر به باز شدن در می شود.
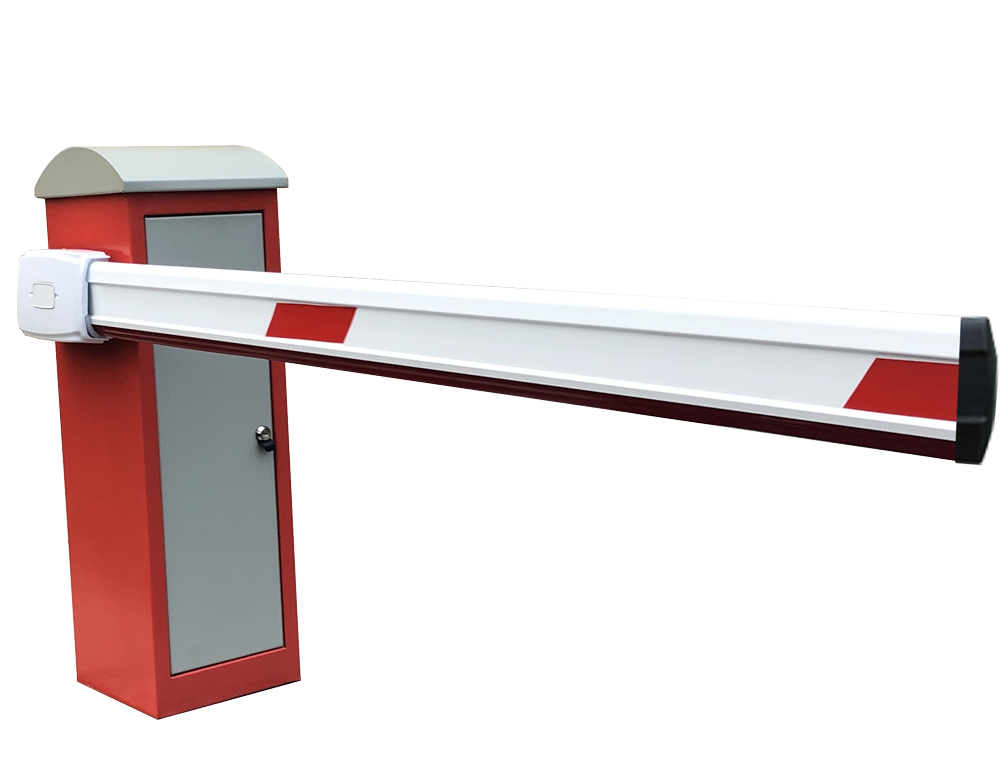
راهبند اتوماتیک معمولاً در تاسیسات پارکینگ، ایست های بازرسی و ورودی مناطق محدود وجود دارد. آنها همچنین روش معمول برای کنترل عبور از بخش های عوارض هستند. در برخی نقاط، راهبندهای اتوماتیک به عنوان آرام کننده ترافیک نصب شده و از تردد جلوگیری می کند.
ک پارکینگ دستگاهی است که با اضافه شدن روی در های لولایی، امکان باز و بسته شدن در با ریمون را فراهم میکند. این جک که به طور معمول روی در ورودی و خروجی اصلی منازل نصب می شود، به افراد کمک می کند که به آسانی و بدون نیاز به پیاده شدن از وسیله نقلیه خود و با استفاده از ریموت در را باز یا بسته نگهدارند.

آرامبند یک دستگاه هیدرولیک است که برای بستن خودکار درب پس از باز شدن استفاده می شود. قفل کننده درها معمولاً با مایع هیدرولیک پر می شوند که نوسان در را تعدیل کرده و عملکرد آن را کنترل می کند.







درباره ما
گروه فنی مهندسی گرین کو مفتخر است با هدف فروش ، نصب ، خدمات و طراحی سیستم های حفاظتی امنیتی و رفاهی ساختمان شامل درب های اتوماتیک (جک پارکینگ، کرکره اتوماتیک،اپراتور شیشه ای،راهبند، قفل برقی ،آرامبند، شیشه سکوریت ،درب سکشنال زیرسقفی، شیشه های ضدگلوله و ضدحریق شیشه ضدگلوله 30میل و....)در سرتاسر تهران بصورت 24ساعته پاسخگوی مشتریان عزیز میباشد.
درباره ما
کارشناسان گرین کو، آماده ارائه خدمات در کمترین زمان به شما عزیزان هستند.
مجموعه گرین کو اصل بودن کالای خریداری شده توسط شما را ضمانت می کند.
گرین کو جهت آرامش رفاه حال مشتریان عزیز امکان پرداخت در محل را فراهم کرده است.
خدمات شرکت گرین کو در تمام نقاط تهران قابل دسترسی است.
هدف تیم پشتیبانی گرین کو تلاش با تمام قوا برای ارائه بهترین خدمات به مشتریان عزیز می باشد.
دپارتمان مشاوره گرین کو، آماده ارائه خدمات مشاوره رایگان در خصوص خرید، تعمیر و نصب لوازم ایمنی و حفاظتی ساختمان به شما عزیزان است.



